

矿场卡车AI智能跟踪管理方案
方案背景
本方案适用于露天矿场管理场景,融合运用AI、数字孪生、雷达检测等科技手段,对运矿卡车及料堆装卸矿过程进行智能化监测与管理。
根据业务过程,本系统设计对每辆在矿场不同管理区域的卡车身份、卡车装料状态及每次装料起止时间、卡车卸料状态及每次卸料起止时间智能化识别,且对卡车工作期间矿石装载量、每次装卸料后料堆体积变化及料堆坡度进行AI自动测算,通过三维数字孪生方式实现可视化“一张图”管理。
智能跟踪管理方案总览
本方案包括四个部分的系统版块:
1、车辆区域监测管理系统;
2、车辆装卸状态识别系统;
3、料堆实时状态识别系统;
4、三维孪生管理系统。
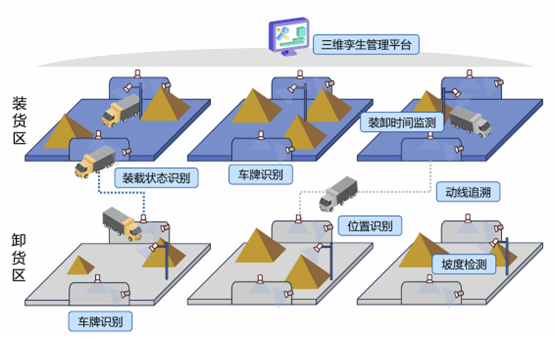
图1-矿场卡车智能跟踪管理方案
车辆区域监测管理系统
本系统主要功能包括:
(1)建模编号:对矿场每个管理区域及进出口闸门进行建模编号;
(2)车牌识别:每个区域进出口闸门安装车牌识别摄像头;
(3)区域管理:对每辆卡车当前所处区域、停留时间、进出记录、装卸货状态和动线模拟进行统一管理;
(4)地图管理:通过二维/三维“一张图”对车辆工作记录进行全局可视化管理。
系统主要工作流程如下:
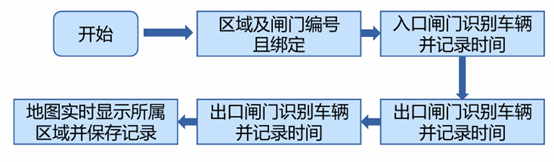
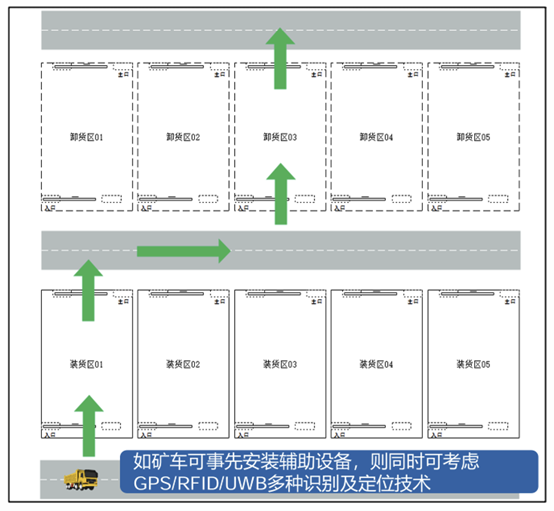
图2-车辆监测管理流程
车辆装卸状态识别系统
本系统主要功能包括:
(1)车辆激光扫描:通过激光雷达点云扫描技术,获取各类卡车的三维轮廓及坐标信息;
(2)车辆模型重建:通过车辆数据库及三维建模,对矿场不同运矿卡车车型进行三维重建;
(3)堆料区域分割:系统匹配车辆模型并与车辆三维点云信息进行比对,实现对车辆堆料区域的分割;
(4)三维体积测算:通过三维空间体积计算方法,量化测算车辆装载堆料的体积。
系统主要工作流程如下:
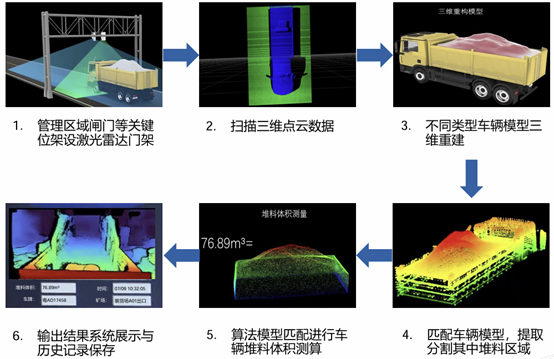
图3-车辆装卸状态流程图
料堆实时状态识别系统
本系统主要功能包括:
(1)料堆体积变化状态识别:在料堆上方安装3D摄像头或雷达,采集料堆三维数据,并通过系统建模与三维匹配测量算法,实现料堆体积实时/定时计量,并反馈状态变化的量化信息。
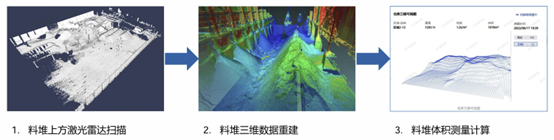
图4-料堆状态识别流程图
(2)料堆坡度测量分析:采集料堆高程图层数据,系统通过三维坡度测量算法,实现对料堆坡度的实时/定时测量计算;当检测到料堆坡度超过一定阈值后,触发自动警告。
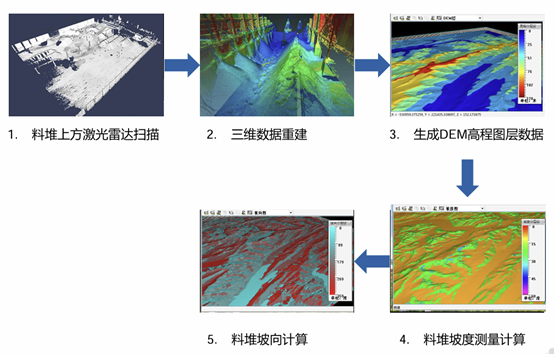
图5-料堆坡度测量流程图
三维孪生管理系统
本系统采用三维数字孪生技术,通过整合车辆区域管理、车辆装卸状态 及料堆实时状态识别等系统,并结合矿场管理区域、料场、车辆等模型的加载,以“一张图”的方式全面直观呈现矿场卡车各环节管理数据,支持多维度数据分析与分场景视频监控。
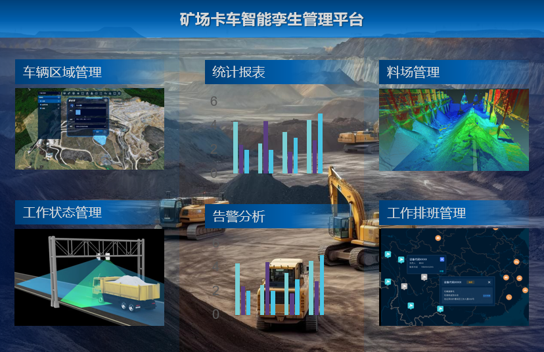
图6-矿场卡车三维数字孪生管理“一张图”